Сервоусилитель с режимом торможения, на микросхемах
Принципиальная схема сервопривода, в котором используется режим торможения, приведена на рис. 7.43. Ждущий мультивибратор реализован на элементе DD1.1. Длительность опорного импульса управляется потенциометром R2, механически связанным с редуктором двигателя рулевой машинки.
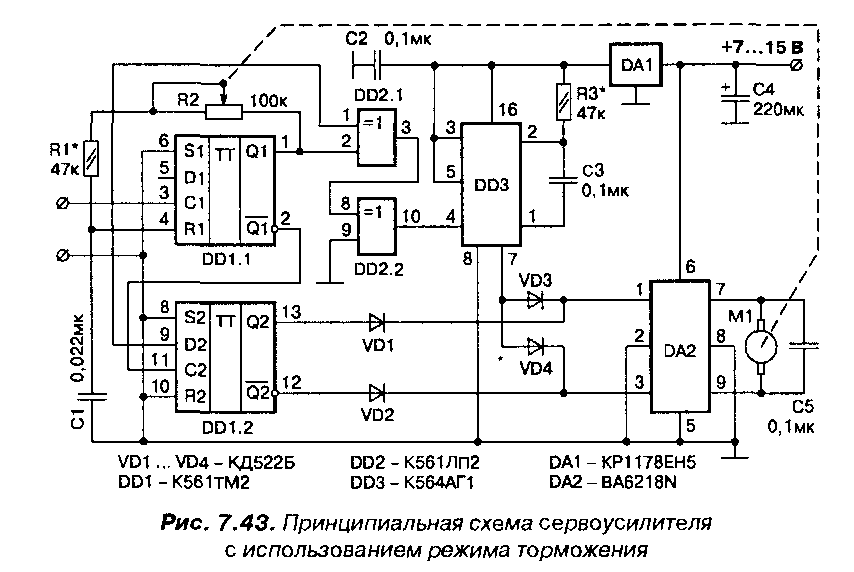
Роль временного дискриминатора играет элемент DD2.1. После буферного каскада DD2.2 на выводе 10 выделяются разностные положительные импульсы при любом соотношении длительностей опорного и канального импульсов, кроме ситуации, при которой эти длительности равны.
Элемент DD1.2 определяет знак разности. Если канальный импульс длиннее опорного, то высокий потенциал появляется на выводе 13, при обратной ситуации — на выводе 12. На микросхеме DD3 собран ждущий мультивибратор с перезапуском. Его длительность импульсов выбрана несколько большей, чем период повторения канальных импульсов.
Удлинитель в схеме отсутствует. Схема работает следующим образом. При равенстве длительностей канального и опорного импульсов, что соответствует какому-либо устойчивому положению рулевой машинки, разностные импульсы на входе ждущего мультивибратора DD3 отсутствуют. На его инверсном выходе (вывод 7) присутствует высокий потенциал, который через развязывающие диоды VD1 и VD2 приложен к обоим входам драйвера DA2. Состояние выходов триггера DD1.2 на работу драйвера при этом никак не влияет. Двигатель заторможен.
При поступлении команды на изменение положения рулевого устройства один из импульсов, поступающих на входы временного дискриминатора DD2.1, становится длиннее другого. Какой именно, зависит от направления отклонения рычага управления на пульте передатчика команд. Пусть, для определенности, тк > топ. В этом случае: во-первых, появятся разностные положительные импульсы, поступающие на вход ждущего мультивибратора DD3. С поступлением первого из них мультивибратор начнет формировать собственный импульс. Потенциал на инверсном выходе (вывод 7 DD3) станет равным нулю. Поскольку длительность мультивибратора выбрана больше опорной, то каждый следующий разностный импульс будет его перезапускать, сохраняя низкий потенциал на инверсном выходе.
Во-вторых, появится высокий потенциал на выводе 13 триггера DDI.2. Через диод VD1 он будет воздействовать на вывод 1 драйвера DA2. На втором входе драйвера в это время потенциал нулевой, в чем легко убедиться. К двигателю прикладывается полное напряжение питания, и он вращает рулевое устройство с максимальной скоростью к новому положению равновесия.
Сопротивление потенциометра обратной связи R2 меняется таким образом, что длительность опорного импульса возрастает, уменьшая длительность разностного. Все это будет происходить до тех пор, пока рулевое устройство не займет новое устойчивое положении, и длительности импульсов сравняются.
Запускающие импульсы перестанут поступать на вход ждущего мультивибратора и спустя 21—22 мс на его инверсном выходе установится высокий потенциал, переведя драйвер в режим торможения. За столь небольшое время выходной вал редуктора рулевой машинки провернется на очень малый угол, и потенциометр R2 практически не изменит длительности опорного импульса.
Если команда имеет противоположное значение, то топ > тк, и ситуация будет отличаться от описанной только тем, что высокий потенциал теперь появится на выводе 12 DDI.2, и двигатель будет вращаться в противоположном направлении.
Детали и конструкция
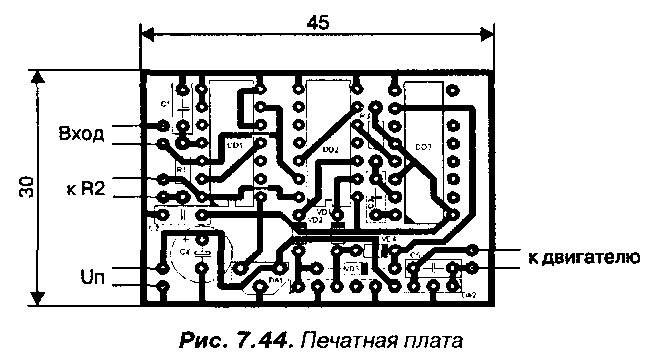
Печатная плата этого варианта сервоусилителя приведена на рис. 7.44. Отверстие под десятую ножку DA3 не высверливается.
Времязадающие конденсаторы С1 и СЗ должны быть пленочными. Перезапускаемый мультивибратор можно реализовать на импортной микросхеме CD4047, включив ее по типовой схеме. Печатная плата при этом, очевидно, измениться. Поскольку режим торможения существует практически во всех микросхемах управления двигателями постоянного тока, на месте DA2 можно использовать любой драйвер с учетом его стандартной схемы включения и соответствующей переделкой печатной платы.
В справочнике [17] можно отыскать достаточное количество и полных аналогов используемой микросхемы, что позволит использовать предлагаемую печатную плату без переделки.
Настройка
В процессе настройки подбором положения корпуса потенциометра R2 и величины резистора R1 устанавливают требуемую исходную длительность опорного импульса и диапазон ее перестройки так, как это описано в разделе 7.3.2,
Затем подбором величины R3 необходимо установить длительность отрицательных импульсов ждущего мультивибратора на выводе 7 DD3 равной 21—22 мс. Для этой цели временно отключают двигатель от микросхемы драйвера, а на вход устройства подают канальные импульсы при соотношении тк * топ.
Подключив двигатель, проверяют работу схемы в целом. Если наблюдается колебательный процесс при переходе к новому положению равновесия, необходимо добиться его устранения подключая со стороны печатных проводников между выводом 4 DD3 и корпусом конденсатор, емкость которого подбирается опытным путем в диапазоне 1000—15000 пФ. Этот конденсатор должен подавлять короткие импульсы на выходе временного раз-личителя, которые могут появляться вследствие того, что двигатель останавливается немгновенно.
Днищенко В. А.
500 схем для радиолюбителей. Дистанционное управление моделями.
СПб.: Наука и техника, 2007. — 464 е.: ил.